Гнучкий маніпулятор на китайському супутнику успішно пройшов випробування на орбіті, демонструючи можливості для обслуговування та дозаправки космічних апаратів. Під час місії були перевірені ключові режими роботи, які можуть стати основою для автономних ремонтів у космосі. Супутник Yuxing-3 06, також відомий як Xiyuan-0, був запущений 16 березня 2026 року з космодрому Цзюцюань за допомогою ракети Kuaizhou-11 Y7.
Це перше випробування гнучкої роботизованої руки, розробленої компанією Suzhou Sanyuan Aerospace Technology у співпраці з партнерами. Основне обладнання супутника — гнучка роботизована рука — була створена спільно з Tsinghua University Shenzhen International Graduate School, а платформу супутника надала компанія Shenzhen Mofang Satellite Technology.
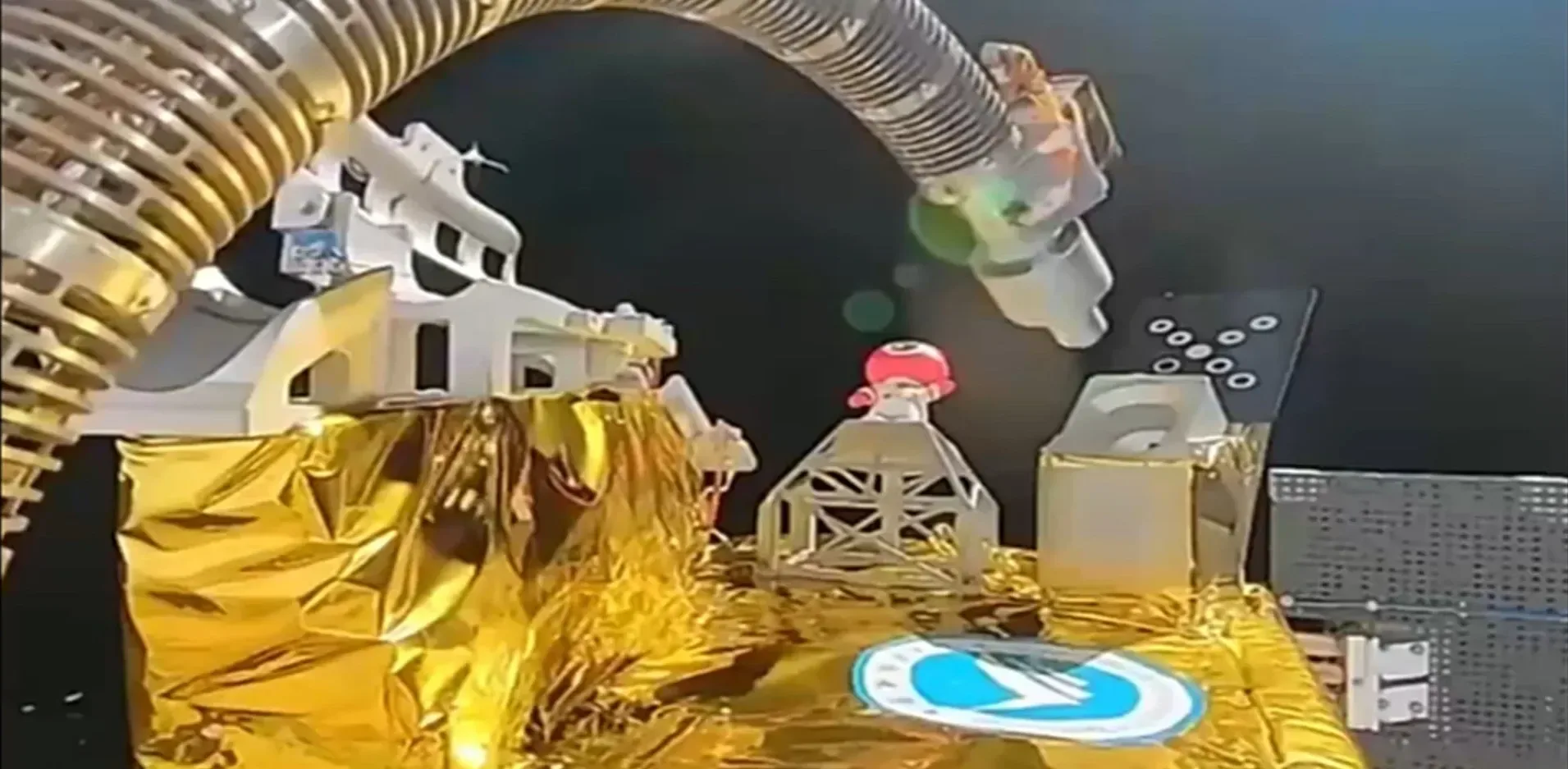
Під час місії інженери протестували руку в кількох складних сценаріях, щоб перевірити технології для обслуговування та дозаправки супутників. Зокрема, були перевірені програмована і дистанційна імітація дозаправки, стикування за допомогою камер та управління з урахуванням сили.
У першому режимі рука самостійно планувала та виконувала рухи без втручання з Землі, переходячи з безпечного положення до стикування і назад, що підтвердило точність автономного планування. У другому режимі оператори керували рукою в реальному часі з Землі за допомогою контролера та відео з камери, що дозволило відпрацювати взаємодію між людиною і системою в космосі.
Третій режим використовував систему візуального контролю: положення маніпулятора визначали за зображенням з камери, після чого формували команди руху. Це перевірило роботу замкненої системи керування між Землею і орбітою. Четвертий режим тестував чутливість до сили, де на основі даних сенсорів рука самостійно керувала рухами, малюючи кола, трикутники та прямі лінії. Це продемонструвало точність контролю та можливість виконання делікатних операцій, таких як складання конструкцій або заміна деталей у космосі.
Конструкція руки поєднує гнучкість, малу вагу та надійність. Вона сумісна з гнучкими паливними трубопроводами, що має зробити майбутню дозаправку на орбіті безпечнішою. Привідні елементи розміщені всередині супутника, що спрощує захист від температур і радіації та знижує витрати на розробку.
Також у місії перевірили взаємодію між супутником і наземними станціями. Завдяки глобальній мережі вдалося підтримувати зв’язок на сонячно-синхронній орбіті, отримуючи до 20 хвилин телеметрії та керування за один сеанс із затримкою менше секунди. Компанія повідомила, що супутник успішно виконав всі заплановані операції з роботизованою рукою, що розглядається як важливий крок уперед у розвитку технологій обслуговування космічних апаратів.


